Inversión cinemática
La inversión cinemática es un procedimiento sistematizado que consiste en alternar el elemento fijo en un mecanismo obteniendo en unos casos topologías diferentes o bien, mecanismos con diferentes características. En efecto, si en un mecanismo no se ha seleccionado el elemento fijo entonces se tiene una cadena cinemática.
Por ejemplo, para un mecanismo de cuatro barras cuyos eslabones se definen como: s , l, p , q, como se muestra en la Figura 1, alternando el elemento fijo se tienen cuatro configuraciones, los cuales se explicaron en el apartado CONFIGURACIONES
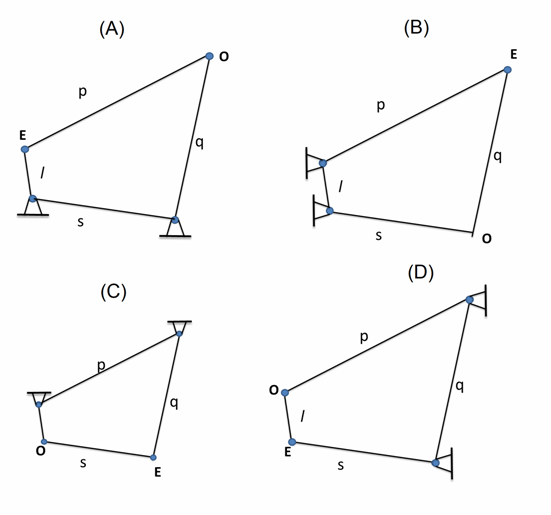
Figura 1. Inversión cinemática para un mecanismo de cuatro barras.
El mecanismo (A) de la Figura 1 se le conoce como mecanismo manivela-oscilador, mientras que el (B) como doble oscilador o mecanismo de arrastre; mientras que el mecanismo (C) tiene la configuración oscilador-manivela, el (D) se le conoce como mecanismo doble oscilador.
También puede aplicarse el mismo criterio para un mecanismo de manivela-corredera cuyo resultado se muestra en la Figura 2.
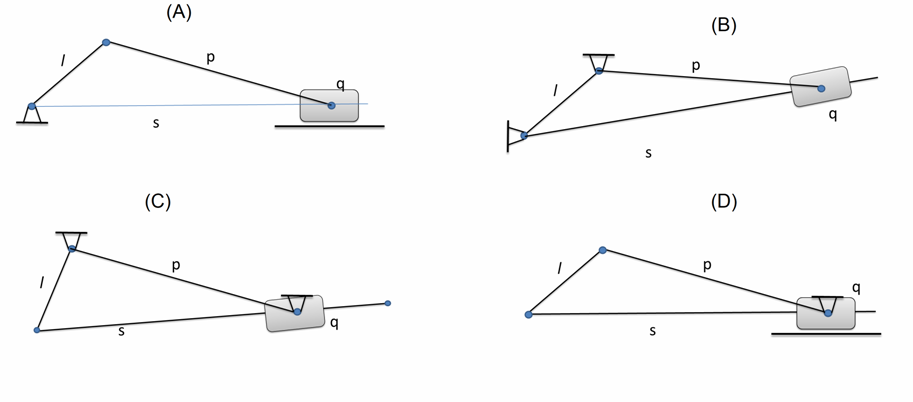
Figura 2. Inversión cinemática para un mecanismo manivela-corredera.
Al practicar una inversión cinemática a este tipo de mecanismo no solo se tiene diferente configuración, si no diferente topologías. En la figura 2, el mecanismo (A) corresponde a la topología original RRRP, mientras que la inversión (B) se tiene un mecanismo conocido como mecanismos de deslizamiento con topología RRPR.
Por su parte, en la topología (C) el elemento P se fija cuyo resultado también pertenece a los mecanismo de deslizamiento, teniendo en este caso una topologia RPRR. Por último el mecanismo (D) donde se fija completamente la corredera teniendo una topologia PRRR.
Created with the Personal Edition of HelpNDoc: Free EPub producer