Guiado de sólido en tres posiciones con biela extendida
En el apartado anterior se explico un procedimiento para sintetizar un mecanismo para el guiado de un sólido rígido para do sy tres posiciones,Figura en donde las características de la técnica y del tipo de mecanismo tiene en cierta manera unas limitantes.
En este apartado se hará uso de un mecanismo de manivela oscilador con biela extendida para ampliar las capacidades de diseño de guiado de sólido rígido. En mecanismo de manivela-oscilador con biela extendida se muestra en la Figura 1.
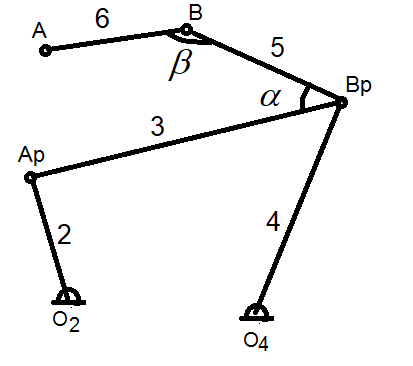
Figura 1. Mecanismo de Biela extendida
En la figura 1 se puede apreciar la Biela 3 formada por una pieza Ap,Bp,A,B. en donde el elemento AB se utilizará como elemento de movilidad de la pieza que se desea desplazar.
Ya que se agrego un elemento más en el mecanismo, hace suponer que es posible agregar una posición más de diseño, y efectivamente con este mecanismo se puede intetizar una necesidad de movilidad para cuatro posiciones, donde el resultado final es las dimensiones de los eslabones y la ubicación UNICA de los polos O2 y O4.
En el caso de tres posiciones se puede tener la ventaja de posicionar O2 y O4 en donde se desee, pero a diferencia de la síntesis de dos posiciones con biela extendida, donde Ap y Bp podrían moverse, en el caso de tres posiciones los puntos Ap y Bp quedarán definidos en el resultado de la síntesis, por lo que si el mecanismo se enmaraña, es necesario reubicar los polos O2 y O4.
La estrategia a utilizar consiste en el uso del polo relativo y en su efecto, la inversión cinemática.
Necesidad: Se desea desplazar un objeto en tres posiciones sobre un soporte, del soporte se extrae una línea de trabajo AB. Determine la tipología de un mecanismo doble oscilador que permita desplazar el objeto en ambas posiciones A1B1 y A2B2 usando una biela extendida.
Requerimiento para la síntesis. Datos relacionado con las dos posiciones deseadas del sólido rígido como son: longitud de la línea de trabajo (LAB) menor o mayor a la pieza a desplazar, datos vectoriales de las tres posiciones deseadas.
Resultado: El resultado de la presente síntesis se deberá tener los siguientes parámetros, mismos que se muestran en la Figura 2.
Parámetro |
Valor |
Coordenadas del rotopolo O2 |
|
Coordenadas del rotopolo O4 |
|
Longitud del eslabón 2 (L2) |
|
Longitud del eslabón 3 (L3) |
|
Longitud del eslabón 4 (L4) |
|
Longitud del eslabón 5 (L5) |
|
Longitud del eslabón 4 (L6) |
|
Ángulo α |
|
Ángulo β |
Tabla 1. Tabla de resultados.
2.1 Método gráfico
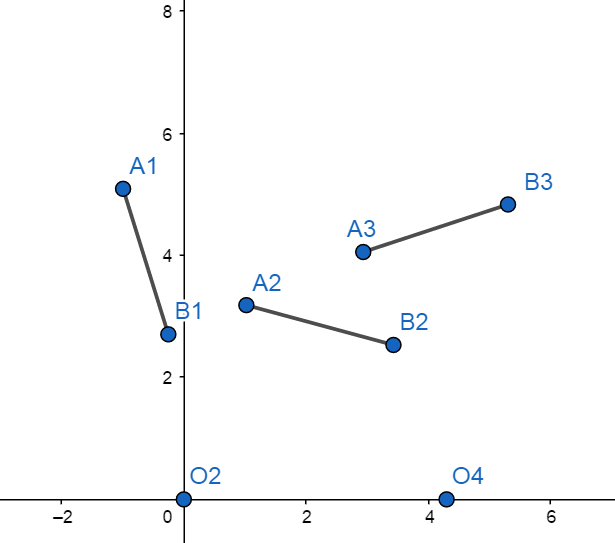
Figura 1
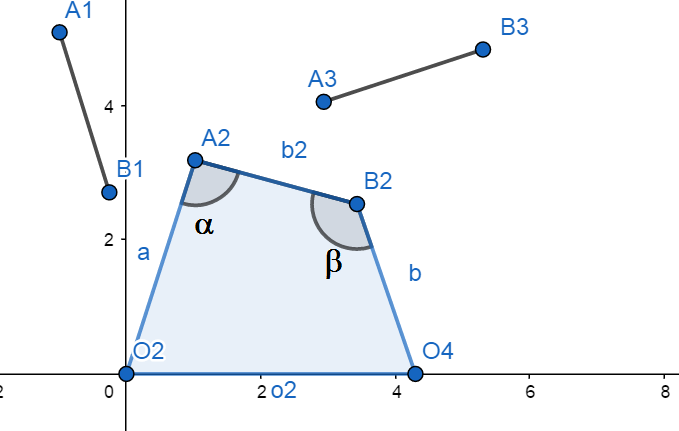
Figura 2
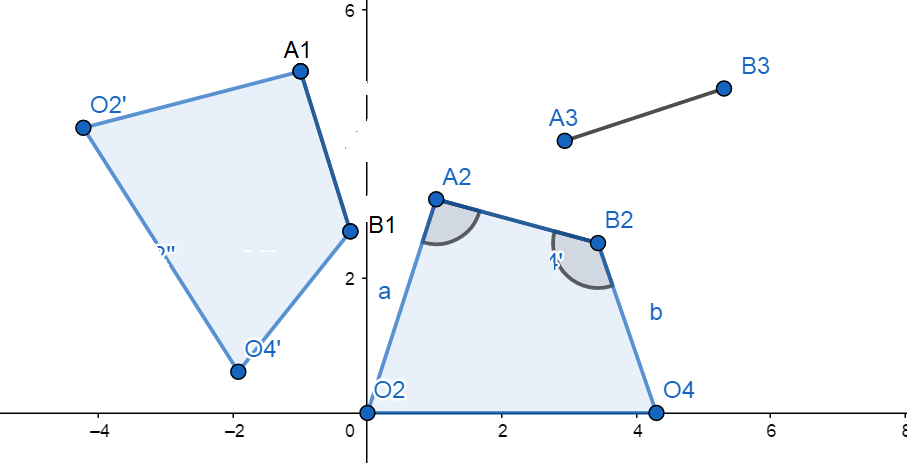
Figura 3
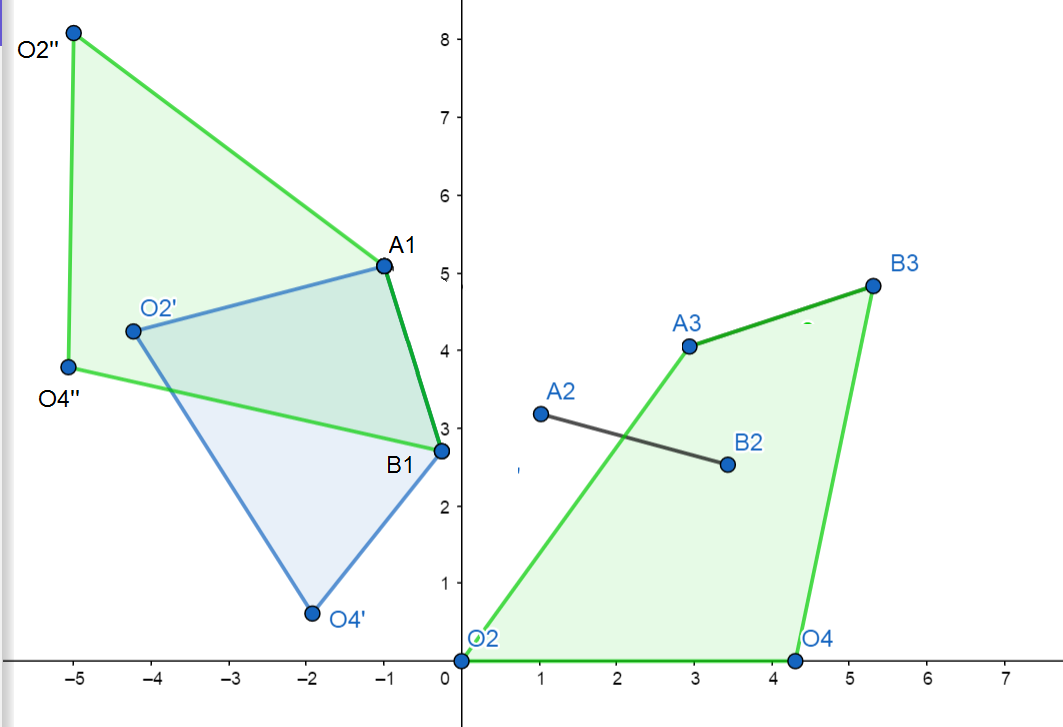
Figura 4
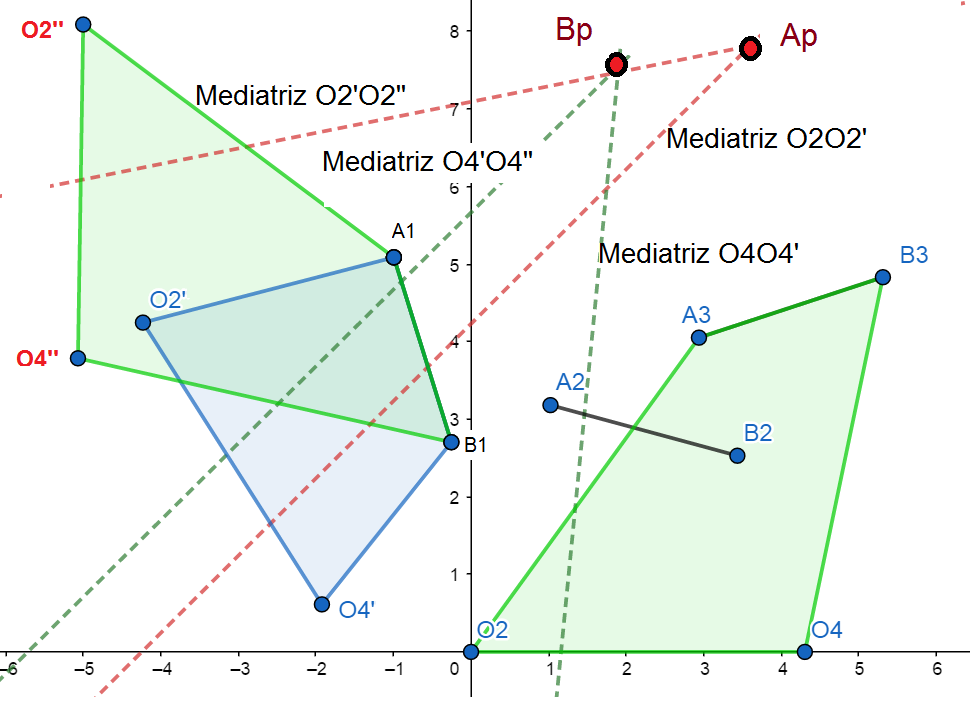
Figura 6
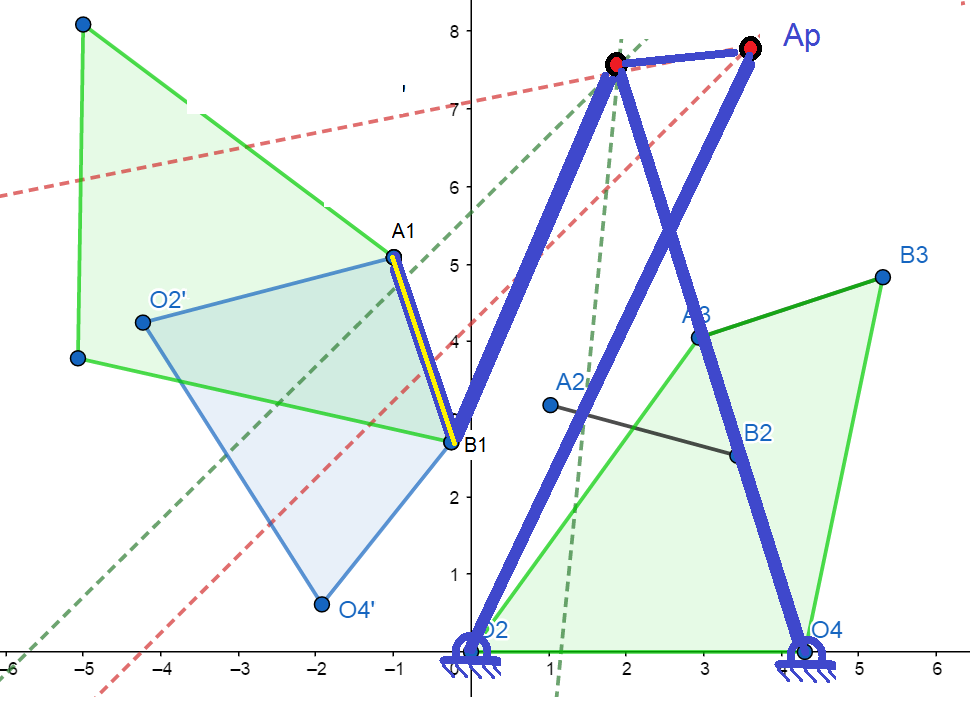
Figura 7
Este mecanismo puede ser modificado si se modifican los pivotes O2 y O4.
2.2 Método analítico.
2.3 MWS
Created with the Personal Edition of HelpNDoc: Free help authoring tool