Guiado de sólido en tres posiciones, RRRR con rotopolos fijos
En el apartado de síntesis para dos posiciones con rotopólos móviles al disponer de solo dos posiciones para diseño, y teniendo el conocimiento de que en un plano una circunferencia única queda definida por tres puntos, entonces se puede extender una posición más de diseño y tener así una solución única de un mecanismo manivela-oscilador o doble oscilador, donde los pivotes del oscilador quedarán definidos, es decir, no se pueden mover a conveniencia, por lo menos con este tipo de mecanismo; sin embargo existe otro donde se pueden definir a voluntad los rotopólos y que se le conoce mecanismo de biela extendida.
El mecanismo a sintetizar y las necesidades de diseño se pueden mostrar en la Figura 1
Necesidad: Se desea desplazar un objeto en tres posiciones sobre un soporte, del soporte se extrae una línea de trabajo AB. Determine la topología de un mecanismo doble oscilador que permita desplazar el objeto en las posiciones A1B1, A2B2 y A3B3 usando la biela como elemento de soporte.
Requerimiento para la síntesis. Datos relacionado con las dos posiciones deseadas del sólido rígido como son: longitud de la línea de trabajo (LAB) menor o mayor a la pieza a desplazar, datos vectoriales de las tres posiciones deseadas.
Resultado: El resultado de la presente síntesis se deberá tener los siguientes parámetros, mismos que se muestran en la Figura 2.
Parámetro |
Valor |
Coordenadas del rotopolo O2 |
|
Coordenadas del rotopolo O4 |
|
Longitud del eslabón 2 (L2) |
|
Longitud del eslabón 3 (L3) |
|
Longitud del eslabón 4 (L4) |
Tabla 1. Tabla de resultados
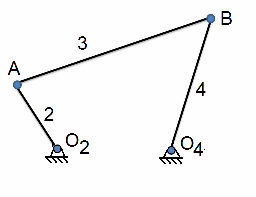
Figura 2
2.1 Método gráfico
Para la solución es necesario disponer las tres posiciones de diseño, A1B1, A2B2 y A3B3; por lo general se desarrolla la siguiente tabla de diseño, donde se proporcionan las coordenadas de A1, A2 y A3; las inclinaciones de la barra θAB1, θAB2 y θAB3, así como la longitud de la barra de trabajo LAB.
|
X (cm) |
Y (cm) |
θAB |
A1 |
|||
A2 |
|||
A3 |
Tabla 2 Tabla de diseño
Lo primero a elaborar son los trazos de las tres posiciones, primero colocar en un sistema de coordenadas las posiciones A1, A2 y A3
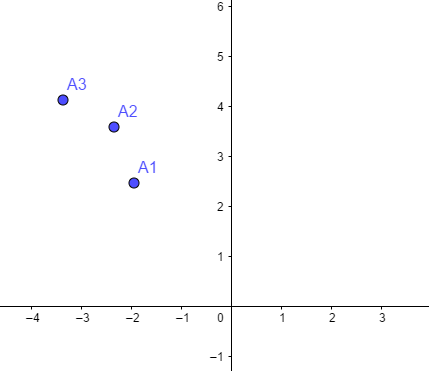
Figura 3, Posiciones del nodo A
Ahora se construyen los puntos B1, B2 y B3 a partir de las coordenadas de A1, A2 y A3, respectivamente, para ello se utiliza la longitud AB y los ángulos θAB1, θAB2 y θAB3 de la Tabla de diseño (Tabla 2).
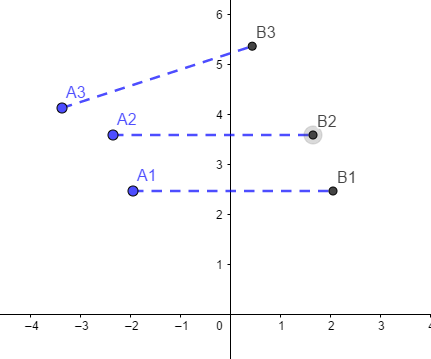
Figura 4. Posiciones del nodo B
Ahora buscar el centro de giro de las posiciones del nodo A y del nodo B, para ello se debe trazar una mediatriz entre los puntos A1A2 y A2A3 para el centro de A, y B1B2 y B2B3 para el centro de B
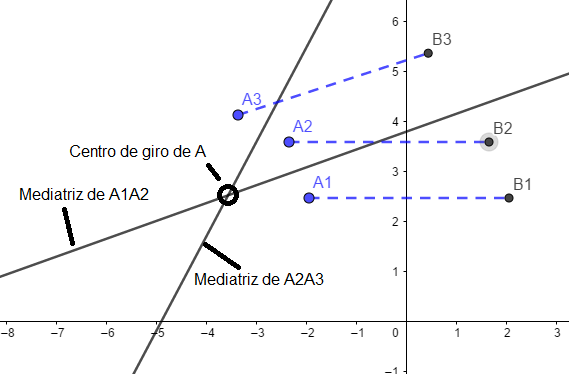
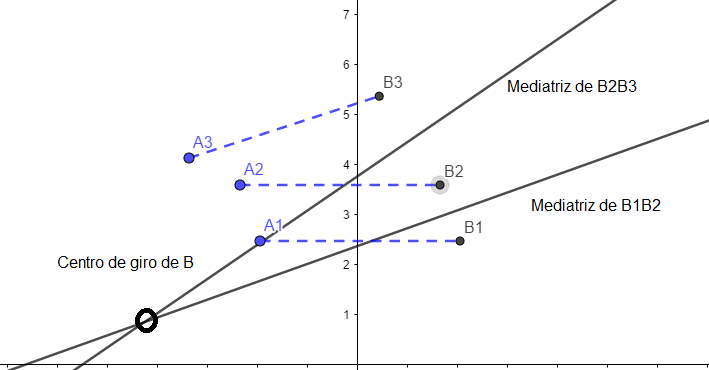
Figura 5 Ubicación de rotopolos
Una vez localizados los centros de giro de A y B, se denominarán los rotopolos de la manivela(u oscilador) de entrada y el oscilador de salida, es decir O2 y O4 de la Figura 1, mientras que la longitud de la manivela (u oscilador) de entrada será la longitud O2 hacia A1, y la del oscilador de entrada la longitud de O4 hacia B1, el mecanismo final se muestra en la Figura 6
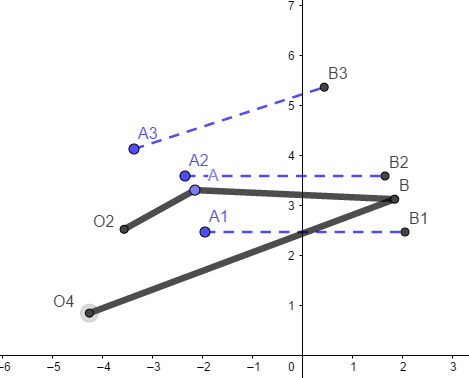
Figura 6. Resultado final de la síntesis
2.2 Método analítico.
2.3 MWS
Created with the Personal Edition of HelpNDoc: Easily create EPub books